|
|
Post by AJ on Jun 6, 2008 8:34:48 GMT -5
Name: Force power
Shape: Simple low cuboid shape
Weapons: A front 4mm thick scoop that can work either way round and it razor sharp to get under anything
Armour: 7mm thick Titanium/Vandium 9010 alloy shell and chassis
Dimensions (L x W x H): 80cm x 70cm x 10cm
SRIMECH: Invertible
Strength: Extreme speed, pushing power, low profile
Weakness: Vulnerable wheels, high ground clearance
Weight: ~99.798kgs could be slightly more or less
Speed: 25mph top speed
Turning Circle: 0 with Tank style steering
Ground Clearance: 0 at front and 1cm at sides and back
Wheels: 8 Solid Foam tyred wheels with extra grip spikes that can run invertible
Power: 8x NiMh batteries driving 8x S28-400 MagMotors at 36v each with Vantec speed controlling and Futaba gyro
Tactics: Being as this can out-push most robots the tactic is to release the pit and using the scoop to collect the robot and push it straight into the pit! If that fails then 100hp of force and 7mm thick titanium alloy should hopefully last me until a pit opens or of course slam them into arena obstacles and house robots and (if they can take it) the walls!
|
|
|
|
Post by AJ on Jun 6, 2008 8:35:09 GMT -5
ForcePower 3.0
ForcePower 3.0 in now shaped very similarly to Storm II instead of the old box wedge shape the robot in now a box wedge with sloped sides to hopefully give a lower side without the need for skirts. The front wedge is adapted at the front giving it a little nose to aid sliding under robots, hopefully skirts too. You can see a picture of the shape here:
This version has very few modifications to the drive train; again Hawker Genesis Nickel Cadium batteries drive two LEM130 Lynch Motors, the change this time is the motors have been up-volted slightly to 48v. Basically the robot in now using an identical drive system to Storm II therefore giving over 18hp to push robots around with.
To match the Storm II like shape and drive train ForcePower 3.0 now uses six Vulcalon wheels as well, that should provide excellent grip on the arena surface to help to the pushing. The motors are driven my a belt to the wheels getting to top speeds of around 20mph, so it can ram robots fast, and get out of any trouble quickly too! The six wheels turn the robot on the spot using a skid steering system similar to that on Tornado.
There is around 1cm Ground Clearance around the whole robot minus the front nose that rides along the floor, so this means it can move about quite well if it is in a pin and safely travel on any debris or uneven flooring without getting stuck.
Another change to the design this time round is the armour; spinners are becoming massive threats to the vapourboteering world, especially walking full body spinners. ForcePower 3.0 has always been known as a spinner killer, hopefully this time it will pay off! The front wedge in now 1cm thick of solid Steel 600 (Hardox) that should hopefully stop any high energy spinners dead, when its up to the wedge and the powerful drive train to keep on them and push them around the arena. The rest of the robot now has 5mm thick Aluminium 6061, light and thin unfortunately because of the weight the front wedge takes up!
The two previous versions of ForcePower have been static, this time because of the new rules ForcePower 3.0 has to be fitted with an active weapon. Again though the main weapon this time will the front wedge, now super low and heavy it should get past most flipping scoops and skirts, and now its hopefully spinner proof. Hoping with the new nose to slide under anything and ram them all over the ring, if the walls are low enough then it can sometimes get a robot on the front wedge and ram them full power at them and bash it out. But it is mainly used for scooping under and ramming robots all over the arena.
To fit the active weaponry rule at the back there is a 120mm Bore ram powered by a 1.1kg CO\-{2} bottle, resting horizontally. At the back of the robot is a small hole, that the ram can be fires through. On the end of the ram is a diamond shaped Tungsten tip designed for spearing robots and pushing them away from the rear end at pressures of 750psi. The mechanism can also be used to nudge the robot of its back if it gets stuck.
The robot as always can work invertible, but this time the wedge etc…will not be active once flipped. Hopefully the speed and low sides should save it from being flipped too often though.
|
|
|
|
Post by AJ on Jun 6, 2008 8:35:26 GMT -5
Name: ForcePower Turbo
Body Shape: There’s a change in the body shape this time, so help flip robots and deflect spinners. It’s a box wedge shape, but it’s about twice as high as before and now has a steeper wedge, the back is rounded.
Colour: ForcePower has a nice new shiny silver paint colour with a red/orange flame down either side.
Weight: I’ll guess it is 100kg for now, because I haven’t done a full weight check.
Dimensions: 70cm x 65cm x 25cm (Length x Width x Height)
Speed: 15mph, nearly 10mph slower this time for the added control.
Turning Circle: The robot can turn on the spot using a skid-steer system.
Ground Clearance: Pretty much as low as you can get on the front wedge, leading gradually up to around 15mm at the back of the robot.
Armour: 5mm thick Hardox 600 on the front wedge with 5mm thick Aluminium 6061 on the baseplate. The sides and back are made of 5mm thick Grade 5 Titanium. (Please tell me if you think this is OTT)
Motivation: Four big, inner wheels that can run invertible, treaded with Vulcalon.
Drive: To keep ForcePower up-to-date with the latest pushers it uses two B42-500 Magmotors on 60v. The motors are run on 250 C-Cell NiCad Batteries to produce the 60v needed to power the motors. This drive train is capable of producing a kick ass 64hp!
Weapons: Brute force to ram robots into arena obstacles and walls.
SRIMECH: The robot works upside down, and can be driven well by using the speed controllers invert switch
Strengths: Awesome pushing power, control and manoeuvrability.
Weaknesses: Not very effective once turned upside down, might be too powerful for it’s own good.
|
|
|
|
Post by AJ on Jun 6, 2008 8:35:42 GMT -5
FP4.0
Shape: Pretty much identical to the S7 version of Tornado, a compact box with an angled rear for helping to drive up ramps. There is no wedge at the front, it is flat.
Dimensions: 800mm x 800mm x 200mm (Length x Width x Height)
Motivation: Four wide custom made Aluminum hubs with a layer of Vulkolan bonded around the edge to give loads of traction on the arena surface. These wheels can be interchanged with spiked versions of the wheel.
Drive: As before, two B42-500 Magmotors are used to drive the wheels. The motors are powered by 250 C-Cell NiCad batteries, which produces the 60v needed to make the 64hp, frightening from a 100kg robot.
Speed: The speed is kept down to 15mph to give much better control of the power and drive train, giving it an advantage against fast robots.
Turning Circle: The Tornado style skid steer means FP4.0 can turn on the spot.
Ground Clearance: 10mm all the way round, both ways up.
Skirts: 6mm thick Ti/V skirts can be attached to the sides using a rotary joint.
Armour: 6mm thick Hardox monocoque.
Weapons: The main form of attack if the front hinged wedge made of 8mm Titanium. It works both ways up so there is no danger when being flipped. At the back, there is a small vertical triangular Manta style blade powered by a S28-150 Magmotor at 12v.
Self-Righting Mechanism: Invertible, the blade stops it resting on its front; the rear is shaped so it cannot land there and the side skirts stop it resting there. When the skirts are removed bars are added to the side to have the same effect.
Notes: Tornado on acid, lots of acid.
|
|
|
|
Post by AJ on Jun 6, 2008 8:36:02 GMT -5
Name: ForcePower 5.0
Shape: Pretty much identical to the S7 version of Tornado, a compact box with an angled rear for helping to drive up ramps. There is no wedge at the front, it is flat.
Dimensions: 800mm x 800mm x 200mm (Length x Width x Height)
Weight: 100kgs
Motivation: Four CNC Aluminum wheels with holes for weight reducing. There are two choices of tyre that can be used on the edge of these wheels. The first choice are bonded with Vulkalon rubber for superb grip on metal surfaces. The second choice are made with standard rubber with small screws poking out for extra grip on wooden surfaces.
Power: Two LEM200’s are used to drive the wheels. The motors are powered by 250 C-Cell NiCad batteries, which produces the 60v needed to make the ~100hp.
Speed: The speed is kept down to 15mph to give much better control of the power and drive train, giving it an advantage against fast robots.
Turning Circle: The Tornado style skid steer means FP5.0 can turn on the spot.
Ground Clearance: 10mm all the way round, both ways up.
Skirting: 6mm thick Ti/V skirts can be attached to the sides using a rotary joint.
Armour: 6mm thick Hardox monocoque.
Weapon: Front invertible wedge and ramming force.
SRIMECH: Invertible, the rear is shaped so it cannot land there and the side skirts stop it resting there. When the skirts are removed bars are added to the side to have the same effect.
|
|
|
|
Post by AJ on Jun 6, 2008 8:36:22 GMT -5
Name: Exertion
Shape: Low to the ground box with tapering rear end like Tornado.
Weight: 100kgs
Length: 700mm
Width: 700mm
Height: 150mm
Motivation: Four internal wheels, each 170mm in diameter with a central hub of 7075 Aluminium. They are treaded with Asmaprene urethane rubber to provide excellent grip on all arena surfaces and are especially designed to be resistant to oil spills and other debris on the arena floor.
Drive: Four S28-400 Magmotors, one powering each wheel. There are run at 24v off 3x 24v NiCad battery packs. This produces around 18hp of drive.
Speed: 15mph
Ground Clearance: 10mm on all sides, 0mm scoop when flush with the ground.
Armour: 5mm thick Hardox monocoque construction.
Weapon: At the front end is a scoop, which is electrically actuated by an S28-150 Magmotor at 24v. This can easily lift up a 200kg robot, while I use the powerful drive train to push things about. The scoop can also work both ways up and is made of 10mm Titanium.
Notes: A toned down replacement for ForcePower.
|
|
|
|
Post by AJ on Jan 22, 2010 20:11:11 GMT -5
Name: Exertion II Weight: 100kgs Shape: A simple low profile box shape. See the CAD below. Length: 700mm Width: 600mm Height: 100mm Motivation: Four 120mm diameter Titanium wheels. Each wheel has a Vulcalon rubber tyre to provide lots of grip. Drive: Four S28-400 Magmotors run at 26.4v from five eight-cell A123 M1 Lithium Ion battery packs. This provides around 18hp, similar to Storm II. Turning Circle: 0mm Speed: 18mph Ground Clearance: 10mm on all sides, but the wedge can run along the ground. Armour: A 10mm thick Titanium/Vanadium alloy monocoque. Weapon: The main weapon is a lifting wedge at the front of the robot. It is made of 5mm thick Hardox and is powered by an S28-400 Magmotor geared at 300:1. It is designed to raise the opponent’s wheels off the ground while the powerful drive system pushes them around. It works equally well both ways up. There are also two static spikes at the rear, made of Titanium. Self-Righter: Exertion II is invertible. The rear spikes and front wedge prevent it from landing on its sides. Notes: Just a refresh, as this series hadn’t been updated for two years. It’s a bit smaller and has a slightly improved drive system. The main upgrades are to the armour and the weapon. 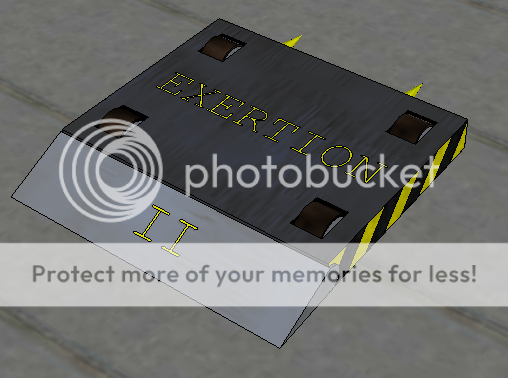 |
|
